
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Članek za razumevanje razlike med koračnimi motorji in servo ter servo motorji
I. Razlike med koračnimi motorji in servo motorji ter servo motorji
Koračni motor: je signal električnega impulza v kotni premik ali premik črte delov koračnega motorja krmilnega elementa z odprto zanko. Preprosto povedano, zanaša se na signal električnega impulza za nadzor kota in števila obratov. Zato se zanaša samo na impulzni signal, da določi, koliko vrtenja. Ker ni senzorja, lahko zavorni kot odstopa. Vendar pa natančen impulzni signal minimalizira odstopanje.
Servo motor: zanašajte se na servo krmilno vezje za nadzor hitrosti motorja, preko senzorja za nadzor položaja vrtenja. Tako je nadzor položaja zelo natančen. In hitrost vrtenja je tudi spremenljiva.
Servo (elektronski servo): Glavna komponenta servo je servo motor. Vsebuje krmilno vezje servo motorja + sklop reduktorjev. Oh ja, servo motor nima reduktorja. In servo ima nastavljen reduktor.
V primeru mejnega servo se zanaša na potenciometer pod izhodno gredjo, da določi kot krmiljenja roke krmila. Krmiljenje servo signala je impulzno širinsko moduliran (PWM) signal, kjer lahko mikrokrmilnik zlahka ustvari ta signal.
II. Osnovni princip koračnega motorja
Kako deluje:
Običajno je rotor motorja trajni magnet in ko tok teče skozi navitja statorja, navitja statorja ustvarijo vektorsko magnetno polje. To magnetno polje bo pognalo rotor, da se zavrti za kot, tako da bo smer para magnetnih polj rotorja enaka smeri magnetnega polja statorja. Ko se vektorsko magnetno polje statorja zasuka za kot. Tudi rotor se vrti za določen kot s tem magnetnim poljem. Za vsak vhodni električni impulz se motor zavrti za en kotni korak naprej. Njegov izhodni kotni premik je sorazmeren s številom vhodnih impulzov, njegova vrtilna hitrost pa je sorazmerna s frekvenco impulzov. S spremembo vrstnega reda, v katerem so navitja pod napetostjo, se motor obrne. Zato je mogoče nadzorovati število in frekvenco impulzov ter vrstni red napajanja navitij vsake faze motorja za nadzor vrtenja koračnega motorja.
Načelo proizvodnje toplote:
Običajno vidimo vse vrste motorjev, notranji so železno jedro in navijalna tuljava. Odpornost navitja, moč bo povzročila izgubo, velikost izgube in upor ter tok je sorazmeren s kvadratom, kar se pogosto imenuje izguba bakra, če tok ni standardni DC ali sinusni val, bo povzročil tudi harmonično izgubo; jedro ima histerezni učinek vrtinčnega toka, v izmeničnem magnetnem polju bo nastala tudi izguba, povezana z velikostjo materiala, tokom, frekvenco, napetostjo, kar se imenuje izguba železa. Izguba bakra in izguba železa se kažeta v obliki proizvodnje toplote, kar vpliva na učinkovitost motorja. Koračni motorji na splošno zasledujejo natančnost pozicioniranja in izhodni navor, učinkovitost je razmeroma nizka, tok je na splošno večji, harmonične komponente pa visoke, frekvenca toka se spreminja s hitrostjo in spremembo, tako da imajo koračni motorji na splošno toplotno situacijo in situacija je resnejša kot splošni AC motor.
III. Konstrukcija krmila
Servo je v glavnem sestavljen iz ohišja, vezja, pogonskega motorja, reduktorja in elementa za zaznavanje položaja. Njegov princip delovanja je, da sprejemnik pošlje signal servo in IC na tiskanem vezju poganja motor brez jedra, da se začne vrteti, moč pa se prenaša na nihajno roko prek reduktorja, hkrati pa detektor položaja pošlje signal nazaj, da ugotovi, ali je prispel na pozicioniranje ali ne. Detektor položaja je pravzaprav spremenljivi upor. Ko se servo vrti, se bo vrednost upora ustrezno spremenila, kot vrtenja pa je mogoče poznati z zaznavanjem vrednosti upora. Splošni servo motor je tanka bakrena žica, ovita okoli tripolnega rotorja, ko tok teče skozi tuljavo, bo ustvaril magnetno polje, obrobje magneta rotorja pa bo povzročilo odboj, kar posledično ustvarja silo vrtenja. V skladu s fiziko je vztrajnostni moment predmeta neposredno sorazmeren z njegovo maso, zato večja kot je masa predmeta, ki ga je treba zavrteti, večja je potrebna sila. Da bi dosegli visoko hitrost vrtenja in nizko porabo energije, je servo izdelan iz tankih bakrenih žic, zvitih v zelo tanek votel valj, ki tvori zelo lahek votel rotor brez polov, magneti pa so nameščeni znotraj cilindra, ki je motor votle skodelice.
Da bi ustrezali različnim delovnim okoljem, so na voljo servo motorji z vodoodpornimi in prahoodpornimi zasnovami; in kot odgovor na različne zahteve glede obremenitev obstajajo plastični in kovinski zobniki za servomotorje, kovinski zobniki za servomotorje pa so na splošno z visokim navorom in visoko hitrostjo, s prednostjo, da se zobniki ne okrušijo zaradi prevelikih obremenitev. Servo motorji višjega razreda bodo opremljeni s krogličnimi ležaji, da bo vrtenje hitrejše in natančnejše. Obstaja razlika med enim krogličnim ležajem in dvema krogličnima ležajema, seveda sta dva kroglična ležaja boljša. Novi FET servomotorji v glavnem uporabljajo FET (tranzistor z učinkom polja), ki ima prednost nizkega notranjega upora in zato manjše izgube toka kot običajni tranzistorji.
IV. Servo princip delovanja
Iz pwm valovanja v notranje vezje za ustvarjanje prednapetosti, generator kontaktorja skozi reduktor za pogon potenciometra, da se premakne, tako da, ko je napetostna razlika nič, se motor ustavi, da se doseže učinek servo.
Protokoli za servo PWM so vsi enaki, vendar so lahko najnovejši servomotorji drugačni.
Protokol je na splošno: širina visoke ravni v 0,5 ms ~ 2,5 ms za nadzor servo za obračanje skozi različne kote.
V. Kako delujejo servo motorji
Spodnja slika prikazuje krmilno vezje servo motorja, narejeno z močnostnim operacijskim ojačevalnikom LM675, motor pa je servo motor DC. Kot je razvidno iz slike, se močnostni operacijski ojačevalnik LM675 napaja s 15 V, napetost 15 V pa se doda vhodu v fazi operacijskega ojačevalnika LM675 skozi RP 1, izhodna napetost LM675 pa se doda vhodu servo motorja. Motor je opremljen z generatorjem signala za merjenje hitrosti za sprotno zaznavanje hitrosti motorja. Pravzaprav je generator signala hitrosti neke vrste generator, njegova izhodna napetost pa je sorazmerna s hitrostjo vrtenja. Napetostni izhod iz generatorja signala za merjenje hitrosti G se vrne nazaj na invertni vhod operacijskega ojačevalnika kot signal napake hitrosti po vezju delilnika napetosti. Vrednost napetosti, nastavljena s potenciometrom za ukaz hitrosti RP1, se doda v fazni vhod operacijskega ojačevalnika po delitvi napetosti z R1.R2, kar je enako referenčni napetosti.
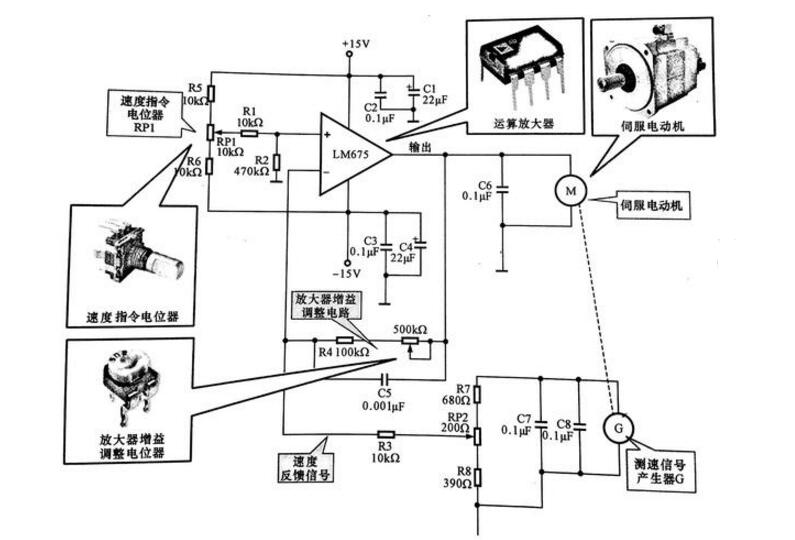
Krmilna shema servo motorja
Servomotor: Označen s črko M za servomotor, je vir energije za pogonski sistem. Operacijski ojačevalnik: označen z imenom vezja, tj. LM675, je del ojačevalnika v servo krmilnem vezju, ki zagotavlja pogonski tok za servo motor.
Potenciometer za ukaz hitrosti RP1: Nastavi referenčno napetost operacijskega ojačevalnika v vezju, tj. nastavitev hitrosti. Potenciometer za nastavitev ojačanja ojačevalnika RP2: Uporablja se v vezju za natančno nastavitev ojačanja ojačevalnika oziroma velikosti povratnega signala hitrosti.
Ko se obremenitev motorja spremeni, se spremeni tudi napetost, ki se vrača na invertni vhod operacijskega ojačevalnika, tj., ko se obremenitev motorja poveča, se hitrost zmanjša, zmanjša se tudi izhodna napetost generatorja signala hitrosti, tako da se napetost na invertiranem vhodu operacijskega ojačevalnika zmanjša, razlika med to napetostjo in referenčno napetostjo pa se poveča, izhodna napetost operacijskega ojačevalnika pa se poveča. Nasprotno, ko se obremenitev zmanjša in se hitrost motorja poveča, izhodna napetost generatorja signala za merjenje hitrosti naraste, povratna napetost, dodana invertiranemu vhodu operacijskega ojačevalnika, se poveča, razlika med to napetostjo in referenčno napetostjo se zmanjša, izhodna napetost operacijskega ojačevalnika se zmanjša in hitrost motorja ustrezno zmanjša, tako da se vrtilna hitrost lahko samodejno stabilizira pri nastavljeni vrednosti.


